oslo_messaging组件
oslo_messaging
🌈相关链接openstack中的Service
Transport
在创建RPCServer和RPCClient都需要指定transport,openstack的每个模块中rpcapi.py的init()方法中都会存在create_transport()方法,本质是调用msg_transport._get_transport
def _get_transport(conf, url=None, allowed_remote_exmods=None,
transport_cls=RPCTransport):
allowed_remote_exmods = allowed_remote_exmods or []
# 注册配置
conf.register_opts(_transport_opts)
if not isinstance(url, TransportURL):
# 如果设置的url不是TransportURL类,则解析为此类
url = TransportURL.parse(conf, url)
# 添加参数,默认交换机和远程异常模块
kwargs = dict(default_exchange=conf.control_exchange,
allowed_remote_exmods=allowed_remote_exmods)
try:
# 根据url.transport前缀加载驱动
mgr = driver.DriverManager('oslo.messaging.drivers',
url.transport.split('+')[0],
invoke_on_load=True,
invoke_args=[conf, url],
invoke_kwds=kwargs)
except RuntimeError as ex:
raise DriverLoadFailure(url.transport, ex)
# 调用Transport的构造方法
return transport_cls(mgr.driver)调用Transport构造方法,可将其看为RPC通信的基类,已经实现了通信需要的各中方法,仅需要driver作为参数
class Transport:
def __init__(self, driver):
self.conf = driver.conf
self._driver = driver
# 要求driver实现部分特征?
def _require_driver_features(self, requeue=False):
self._driver.require_features(requeue=requeue)
# rpc调用的主要方法,调用driver中的send()方法,需要传入target中包含topic参数
def _send(self, target, ctxt, message, wait_for_reply=None, timeout=None,
call_monitor_timeout=None, retry=None, transport_options=None):
if not target.topic:
raise exceptions.InvalidTarget('A topic is required to send',
target)
return self._driver.send(target, ctxt, message,
wait_for_reply=wait_for_reply,
timeout=timeout,
call_monitor_timeout=call_monitor_timeout,
retry=retry,
transport_options=transport_options)
# 发送通知
def _send_notification(self, target, ctxt, message, version, retry=None):
...
# 监听
def _listen(self, target, batch_size, batch_timeout):
...
def _listen_for_notifications(self, targets_and_priorities, pool,
...
def cleanup(self):
...将RPCTransport继承Transport类,则拥有监听消息,发送消息的基本流程
AMQPDriverBase
由于使用消息队列作为发送消息的驱动,所以查看类AMQPDriverBase类,所有的消息队列的Driver都需要继承这个类,例如oslo_massaging.drivers.impl_rabbit.RabbitDriver
class AMQPDriverBase(base.BaseDriver):
missing_destination_retry_timeout = 0
def __init__(self, conf, url, connection_pool,
default_exchange=None, allowed_remote_exmods=None):
super().__init__(conf, url, default_exchange,
allowed_remote_exmods)
# 设置默认交换机
self._default_exchange = default_exchange
# 设置默认连接池,通过impl_rabbit.py可以看到连接池的大小默认为30
self._connection_pool = connection_pool
self._reply_q_lock = threading.Lock()
self._reply_q = None
self._reply_q_conn = None
self._waiter = None
# 以hostname和processname设置队列的名称
if conf.oslo_messaging_rabbit.use_queue_manager:
self._q_manager = QManager(
hostname=conf.oslo_messaging_rabbit.hostname,
processname=conf.oslo_messaging_rabbit.processname)
else:
self._q_manager = None
def _get_exchange(self, target):
# target自带的交换机或默认交换机,nova中的target多数没有指定交换机,所以名字是''?
return target.exchange or self._default_exchange
def _get_connection(self, purpose=rpc_common.PURPOSE_SEND, retry=None):
"""
rpc_common.ConnectionContext.init:
...
if pooled:
# 当操作为send,直接从连接池中获取连接
self.connection = connection_pool.get(retry=retry)
else:
# 尝试创建新的连接,保证了发送操作和监听操作不会是同一个连接
self.connection = connection_pool.create(purpose)
...
"""
return rpc_common.ConnectionContext(self._connection_pool,
purpose=purpose,
retry=retry)
def _get_reply_q(self):
# 保证线程安全
with self._reply_q_lock:
# NOTE(amorin) Re-use reply_q when it already exists
# This avoid creating too many queues on AMQP server (rabbit)
if self._reply_q is not None:
return self._reply_q
if self._q_manager:
reply_q = 'reply_' + self._q_manager.get()
else:
reply_q = 'reply_' + uuid.uuid4().hex
LOG.debug('Creating reply queue: %s', reply_q)
conn = self._get_connection(rpc_common.PURPOSE_LISTEN)
self._waiter = ReplyWaiter(reply_q, conn,
self._allowed_remote_exmods)
# 对于每个连接,都会生成一个队列用于监听
self._reply_q = reply_q
self._reply_q_conn = conn
return self._reply_q
# 创建RPCClient时,应该指定call_monitor_timeout,当监听超过这个时间则返回timeout
def _send(self, target, ctxt, message,
wait_for_reply=None, timeout=None, call_monitor_timeout=None,
envelope=True, notify=False, retry=None, transport_options=None):
msg = message
reply_q = None
if 'method' in msg:
LOG.debug('Calling RPC method %s on target %s', msg.get('method'),
target.topic)
else:
LOG.debug('Sending message to topic %s', target.topic)
if wait_for_reply:
# 需要监听,则创建一个专用队列,即调用RPCClient.call()方法,则会创建一个专用队列
reply_q = self._get_reply_q()
msg_id = uuid.uuid4().hex
msg.update({'_msg_id': msg_id})
msg.update({'_reply_q': reply_q})
msg.update({'_timeout': call_monitor_timeout})
LOG.debug('Expecting reply to msg %s in queue %s', msg_id,
reply_q)
rpc_amqp._add_unique_id(msg)
unique_id = msg[rpc_amqp.UNIQUE_ID]
rpc_amqp.pack_context(msg, ctxt)
# 需要对消息进行包装(序列化)
if envelope:
msg = rpc_common.serialize_msg(msg)
# 监听消息返回
if wait_for_reply:
self._waiter.listen(msg_id)
log_msg = "CALL msg_id: %s " % msg_id
else:
log_msg = "CAST unique_id: %s " % unique_id
try:
with self._get_connection(rpc_common.PURPOSE_SEND, retry) as conn:
if notify:
exchange = self._get_exchange(target)
LOG.debug(log_msg + "NOTIFY exchange '%(exchange)s'"
" topic '%(topic)s'", {'exchange': exchange,
'topic': target.topic})
# 通知类消息则发送通知
conn.notify_send(exchange, target.topic, msg, retry=retry)
elif target.fanout:
# 广播类消息则发送广播
log_msg += "FANOUT topic '{topic}'".format(
topic=target.topic)
LOG.debug(log_msg)
conn.fanout_send(target.topic, msg, retry=retry)
else:
# 否则就发送给target,如果没有指定server,则轮训给target下的server
topic = target.topic
exchange = self._get_exchange(target)
if target.server:
# 发送给target下的server,则将routingKey命名为target.server
topic = '{}.{}'.format(target.topic, target.server)
LOG.debug(log_msg + "exchange '%(exchange)s'"
" topic '%(topic)s'", {'exchange': exchange,
'topic': topic})
# 根据交换机,路由键发送到指定队列中
conn.topic_send(exchange_name=exchange, topic=topic,
msg=msg, timeout=timeout, retry=retry,
transport_options=transport_options)
if wait_for_reply:
# call()方法需要等待消息完成,timeout:整个监听过程的超时时间,call_monitor_timeout不为0则添加另一个定时器监听返回消息,超时则抛出异常
result = self._waiter.wait(msg_id, timeout,
call_monitor_timeout, reply_q)
if isinstance(result, Exception):
raise result
return result
finally:
if wait_for_reply:
# 取消监听
self._waiter.unlisten(msg_id)
def send(self, target, ctxt, message, wait_for_reply=None, timeout=None,
call_monitor_timeout=None, retry=None, transport_options=None):
return self._send(target, ctxt, message, wait_for_reply, timeout,
call_monitor_timeout, retry=retry,
transport_options=transport_options)
def send_notification(self, target, ctxt, message, version, retry=None):
return self._send(target, ctxt, message,
envelope=(version == 2.0), notify=True, retry=retry)
# 控制消费者消费不同种类的消息,其中消费者是rpcserver
def listen(self, target, batch_size, batch_timeout):
conn = self._get_connection(rpc_common.PURPOSE_LISTEN)
listener = RpcAMQPListener(self, conn)
# 为topic为target.topic的消息定义消费者,topic是routingKey
conn.declare_topic_consumer(exchange_name=self._get_exchange(target),
topic=target.topic,
callback=listener)
# 为topic为topic.server的消息定义消费者
conn.declare_topic_consumer(exchange_name=self._get_exchange(target),
topic='{}.{}'.format(target.topic,
target.server),
callback=listener)
# 为topic为fanout=True的消息定义消费者
conn.declare_fanout_consumer(target.topic, listener)
# 轮训传入的消息并执行Listener在启动start时传入的回调函数
return base.PollStyleListenerAdapter(listener, batch_size,
batch_timeout)
# 创建消费者,貌似是根据优先级创建
def listen_for_notifications(self, targets_and_priorities, pool,
batch_size, batch_timeout):
conn = self._get_connection(rpc_common.PURPOSE_LISTEN)
listener = NotificationAMQPListener(self, conn)
for target, priority in targets_and_priorities:
conn.declare_topic_consumer(
exchange_name=self._get_exchange(target),
topic='{}.{}'.format(target.topic, priority),
callback=listener, queue_name=pool)
return base.PollStyleListenerAdapter(listener, batch_size,
batch_timeout)
def cleanup(self):
if self._connection_pool:
# 连接池置为空,不再接受新的请求
self._connection_pool.empty()
self._connection_pool = None
with self._reply_q_lock:
if self._reply_q is not None:
self._waiter.stop()
self._reply_q_conn.close()
self._reply_q_conn = None
self._reply_q = None
self._waiter = None流程图
- 默认行为(非
fanout模式)
共享队列+负载均衡:
如果rpcserver使用相同的topic(例如topic=compute),默认情况下它们会绑定到同一个队列
消息队列中间件(如RabbitMQ)会将消息以轮询(Round-Robin)方式分发给其中一个rpcserver,确保每条消息仅被处理一次
fanout模式行为
独立队列+广播:
当rpcclient发送fanout=True的消息时,oslo.messaging会为每个rpcserver创建一个独立的匿名队列(名称唯一,topic_fanout_uuid),并绑定到Fanout类型的交换机
消息会被复制到所有独立队列,每个rpcserver通过自己的队列接收消息副本
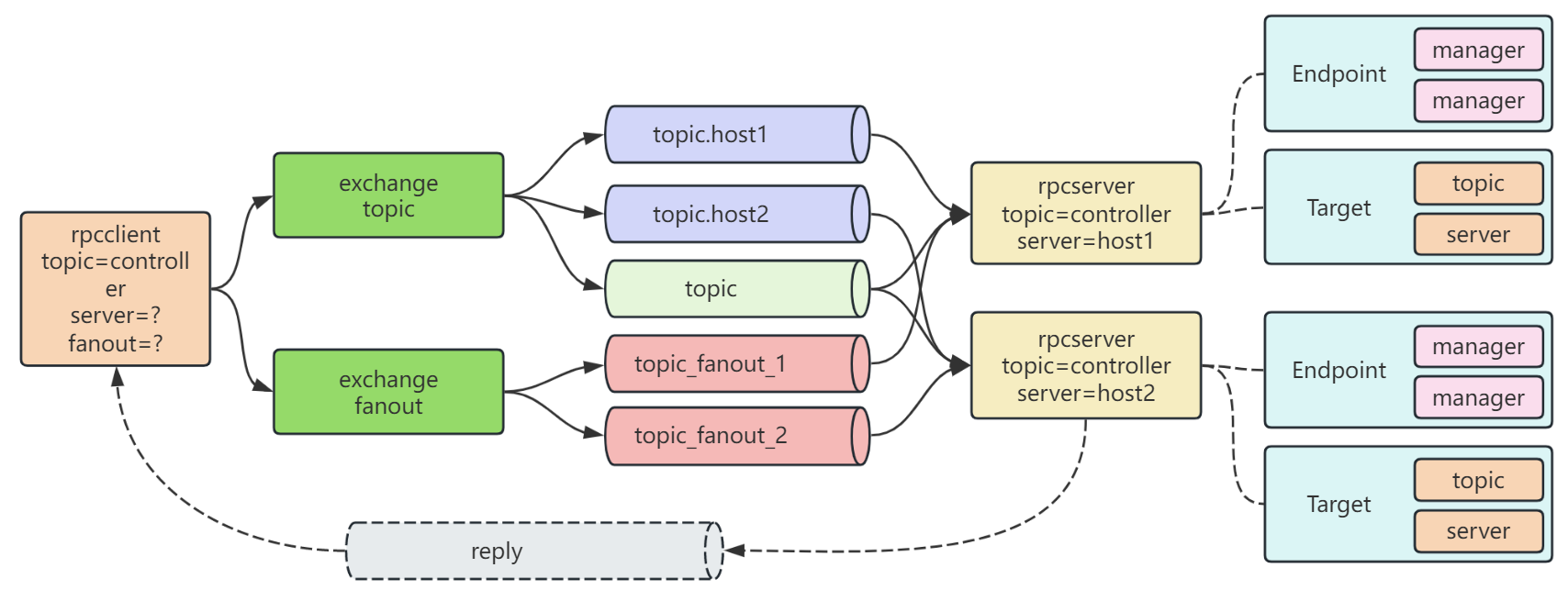
创建rpcserver
创建rpcserver需要指定topic和server,创建rpcserver时会创建三个队列与对应类型的交换机绑定,其对应的路由键分别为topic.server、topic、topic
创建rpcclient
创建rpcclient需要指定topic
- 如果不指定
server,则消息发送到topic消息队列中,并通过轮询的方式发送给消费者(rpcserver) - 如果指定了
server则会发送给topic.server队列,并由一个rpcserver消费 - 如果指定
fanout=True,则消息会发送到所有fanout队列中,订阅该topic的所有消费者都会收到这个消息 - 使用
call()方法时,会临时创建一个反向的reply队列用于监听,调用任务完成后这个队列就会被删除